由多种驱动力驱动的微型机器人在生理环境中具有很好的非侵入性靶向递送潜力。然而,如何在低雷诺数生物环境下实现远程集体感知和精确推进仍然是微型机器人在体内达到预期治疗效果所面临的主要挑战。有鉴于此,同济大学成昱教授构建了一种生物混合微型机器人,它集成了磁性、热和乏氧敏感性以及内部的荧光蛋白,后者可作为热和定位信号的双重报告器以用于癌症靶向治疗。
本文要点:
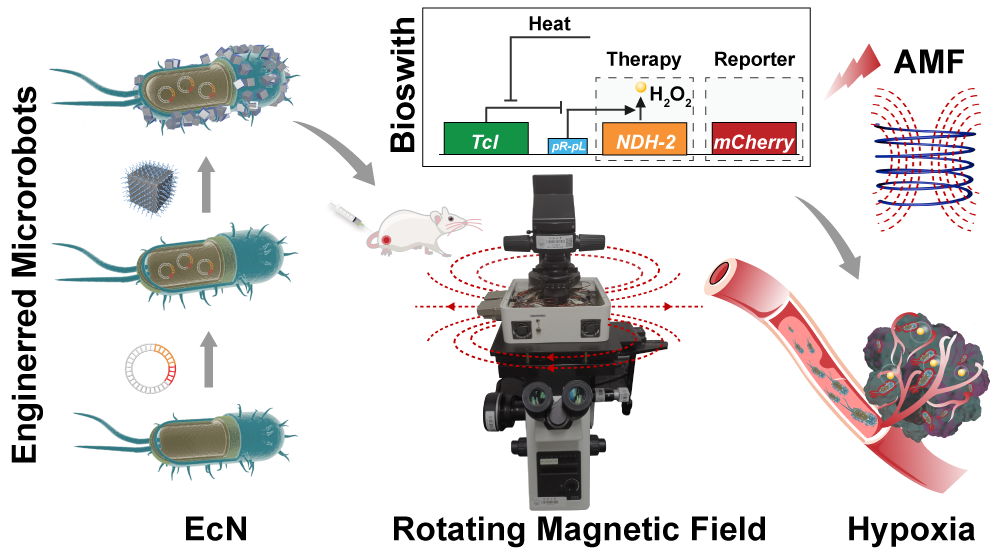
(1)该微机器人系统中有三个关键元素,包括(1)负载磁纳米颗粒(MNP)的益生菌大肠杆菌Nissle1917(EcN@MNP),其用于磁性和乏氧感知;(2)在细菌中控制作为温度和定位报告器的mCherry的生物合成的热逻辑电路以及(3)EcN中编码的NDH-2酶,其可用于增强抗癌治疗。
(2)根据荧光蛋白的成像反馈,该微型机器人能够在磁场作用下对肿瘤区域表现出良好的热敏性和主动靶向能力。通过磁热消融和NDH-2诱导的活性氧(ROS)损伤,该混合型微型机器人可有效地在体内外诱导癌细胞凋亡。综上所述,该研究表明生物混合EcN微型机器人是一种能够整合物理、生物和化学特性以用于集体感知和靶向癌症治疗的理想平台。
Haotian Chen. et al. An Engineered Bacteria-Hybrid Microrobot with the Magnetothermal Bioswitch for Remotely Collective Perception and Imaging-Guided Cancer Treatment. ACS Nano. 2022
DOI: 10.1021/acsnano.1c11601
https://pubs.acs.org/doi/10.1021/acsnano.1c11601


















