在微创血管内手术中,外科医生依靠低灵巧度和高纵横比的导管来达到解剖目标。然而,心脏跳动中的环境带来了少数解剖位置独有的挑战,使得介入工具很难灵活地操作并对心脏内靶点施加实质性力量。
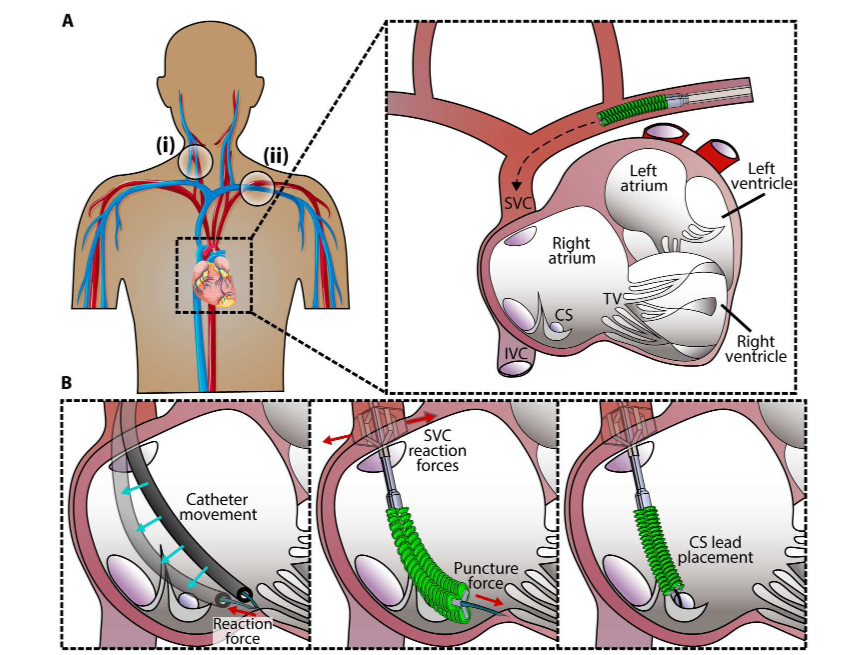
近日,波士顿大学Tommaso Ranzani展示了一个毫米级的软机器人平台,它可以在心脏入口处部署和自我稳定,并引导现有的介入工具朝向目标位置。
文章要点
1)在右心房内的两个示范心内手术中,机器人平台提供了足够的灵活性来到达多个解剖目标,足够的稳定性来保持与运动目标的持续接触,以及足够的机械杠杆来产生牛顿水平的力。
2)由于该设备解决了微创心内介入的持续挑战,它可能会使基于导管的介入的进一步发展成为可能。
参考文献
Jacob Rogatinsky, et al, A multifunctional soft robot for cardiac interventions, Sci. Adv. 9 (43), eadi5559.
DOI: 10.1126/sciadv.adi5559
https://www.science.org/doi/10.1126/sciadv.adi5559


















