 微型生物和运动细胞使用基于蛋白质的弹簧状响应结构来感知、抓握和移动。在人工微机械中实现这种生物力学功能以用于单细胞操作仍极具挑战性,因为需要对皮牛顿级力具有可编程应变响应的纳米级弹簧系统。近日,中国科学院Haifeng Xu、德国莱布尼茨固态和材料研究所Mariana Medina-Sánchez、开姆尼茨工业大学Oliver G. Schmidt报道了具有超柔顺皮力弹簧的软微型机器人。
微型生物和运动细胞使用基于蛋白质的弹簧状响应结构来感知、抓握和移动。在人工微机械中实现这种生物力学功能以用于单细胞操作仍极具挑战性,因为需要对皮牛顿级力具有可编程应变响应的纳米级弹簧系统。近日,中国科学院Haifeng Xu、德国莱布尼茨固态和材料研究所Mariana Medina-Sánchez、开姆尼茨工业大学Oliver G. Schmidt报道了具有超柔顺皮力弹簧的软微型机器人。
本文要点:
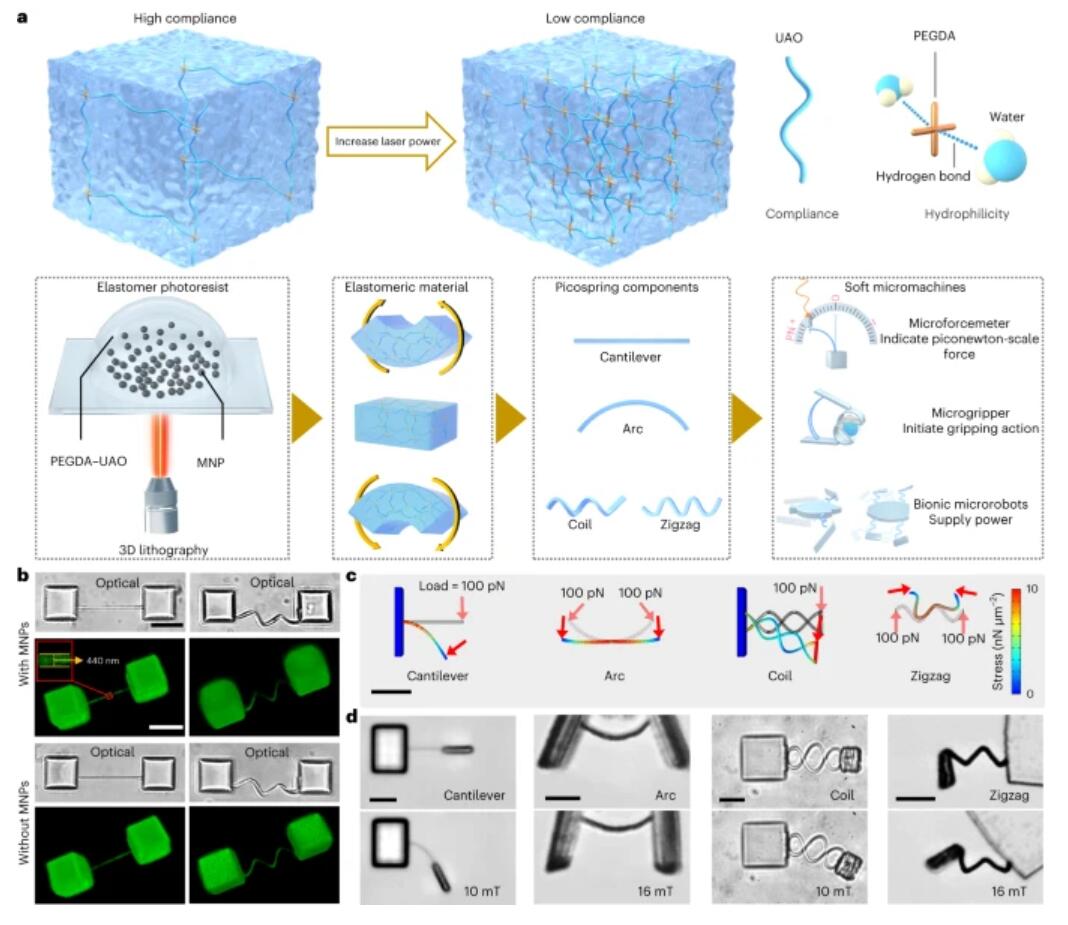
1) 基于丙烯酸弹性体光致抗蚀剂,作者介绍了磁性弹簧系统的3D纳米制造和单片集成,该系统具有对0.5 pN敏感的可量化顺应性 ,可用以纳米级的定制弹性和磁化分布构建。
2) 作者展示了这些“皮弹簧”组件作为能量转换结构的可编程性,可用于定制软微机械的集成构建,并且具有板载传感和驱动功能,从而用于微型机器人的抓取和移动。
Haifeng Xu et.al 3D nanofabricated soft microrobots with super-compliant picoforce springs as onboard sensors and actuators Nature Nanotechnology 2024
DOI: 10.1038/s41565-023-01567-0
https://doi.org/10.1038/s41565-023-01567-0

















