
对于人造材料来说,期望的特性经常会发生冲突。例如,工程材料通常通过牺牲弹性来实现高能量耗散,反之亦然,或者通过失去其各向同性来实现所需的拉胀性,这限制了它们的性能和应用。
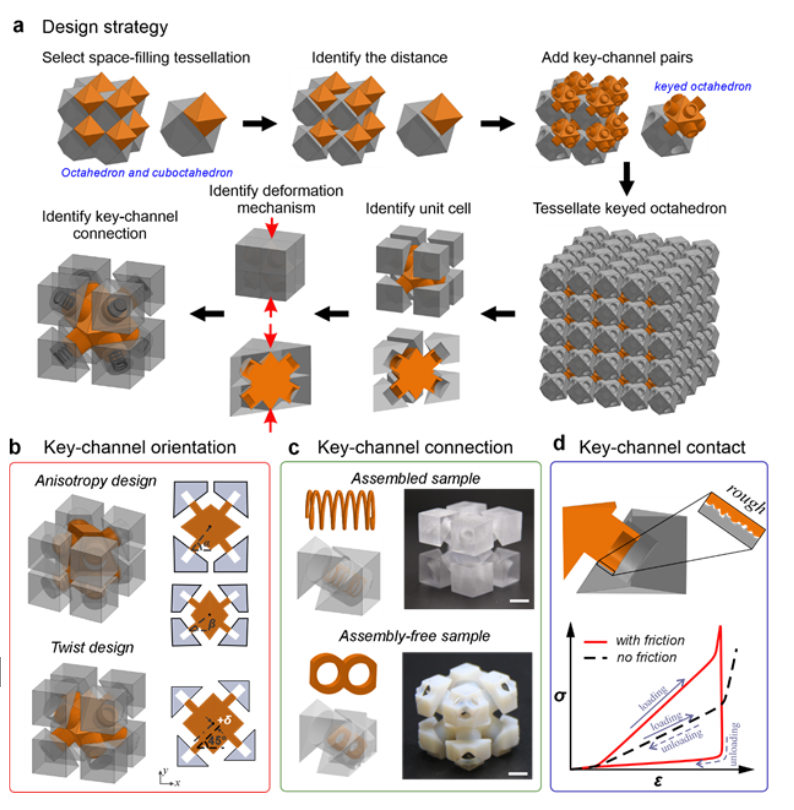
东北大学Yaning Li等提出了一种通过具有啮合键-通道对的3D空间填充瓦片来创建新型机械超材料的策略,以拉胀3D键-八面体-立方八面体超材料为例。
本文要点:
(1)
这种超材料表现出高弹性,同时在大压缩应变下协同实现大的机械迟滞。特别是,这种超材料表现出理想的各向同性,接近各向同性泊松比的理论极限1,这在现有的3D机械超材料中很少见。此外,这种新型超材料在机械性能和行为方面提供了广泛的可调性,包括在正常压缩下不寻常的耦合增长和扭曲行为。设计方法通过数值模拟、理论分析和实验表征的综合来说明。
(2)
新型机械超材料在致动器和阻尼器、软机器人、生物医学材料和用于能量耗散的工程材料/系统中具有广泛的应用。
参考文献:
T. Li, Y. Li, 3D Tiled Auxetic Metamaterial: A New Family of Mechanical Metamaterial with High Resilience and Mechanical Hysteresis. Adv. Mater. 2024, 2309604.
DOI: 10.1002/adma.202309604
https://doi.org/10.1002/adma.202309604

















