
毫米级软连续体机器人由于其被动顺应性,在腔内手术中提供了安全性和适应性,但这一特点需要与周围管腔相互作用,从而导致潜在的医疗风险和行动受限。鉴于此,来自哈尔滨工业大学的谢晖、孟祥和和张号等教授研究出了一种毫米级连续体机器人,能够在保持结构稳定性的同时实现顶端延伸。
文章要点:
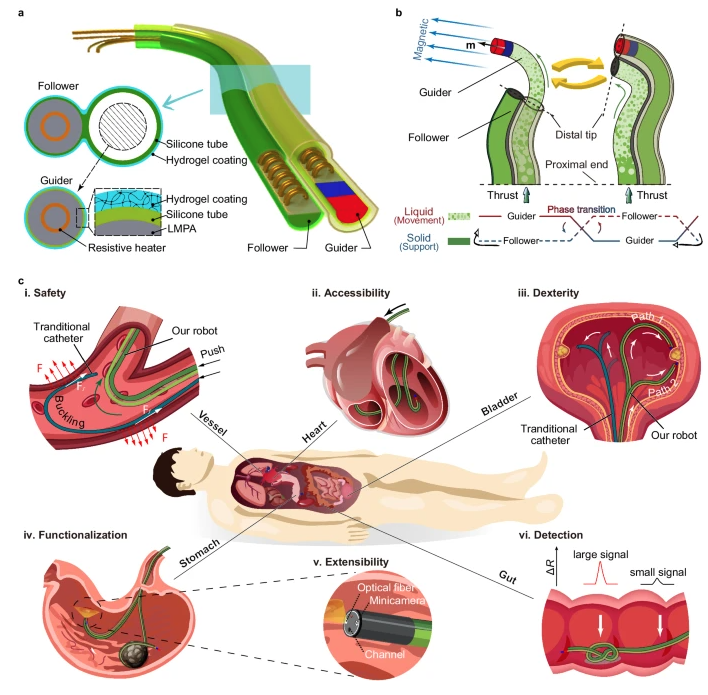
1) 该研究证实,利用相变元件,机器人执行基于尖端的伸长周期,通过可编程磁场精确操纵,并且,每个运动周期都有一个用于稳定的固体状骨架和一个用于推进的液体状组件,从而实现自主成形,而不依赖于环境相互作用,同时,结合临床成像技术,研究展示了在弯曲和脆弱的管腔中导航以运输显微外科工具的能力;
2) 此外,该研究表明,一旦该机器人到达胃等更大的解剖空间,它就可以变形为用作手术工具或传感单元的功能性3D结构,克服最初狭窄路径的限制,通过利用这一设计范式,该毫米级连续体机器人之间的安全性、多功能性和协作能力将得到增强,为腔内机器人手术开辟新的途径。
参考资料:
Mao, L., Yang, P., Tian, C. et al. Magnetic steering continuum robot for transluminal procedures with programmable shape and functionalities. Nat. Commun.(2024).
DOI:10.1038/s41467-024-48058-x
https://doi.org/10.1038/s41467-024-48058-x

















