机器人技术的最新发展日益凸显了传感技术,特别是触觉感知的重要性,使机器人能够有效地与环境互动并解释物理交互。由于功率效率和低成本,摩擦电动机构经常被研究用于测量压力和识别材料,以提高机器人的感知能力。然而,尽管摩擦电效应在日常生活中普遍存在,但利用摩擦电效应检测曲面的探索有限。
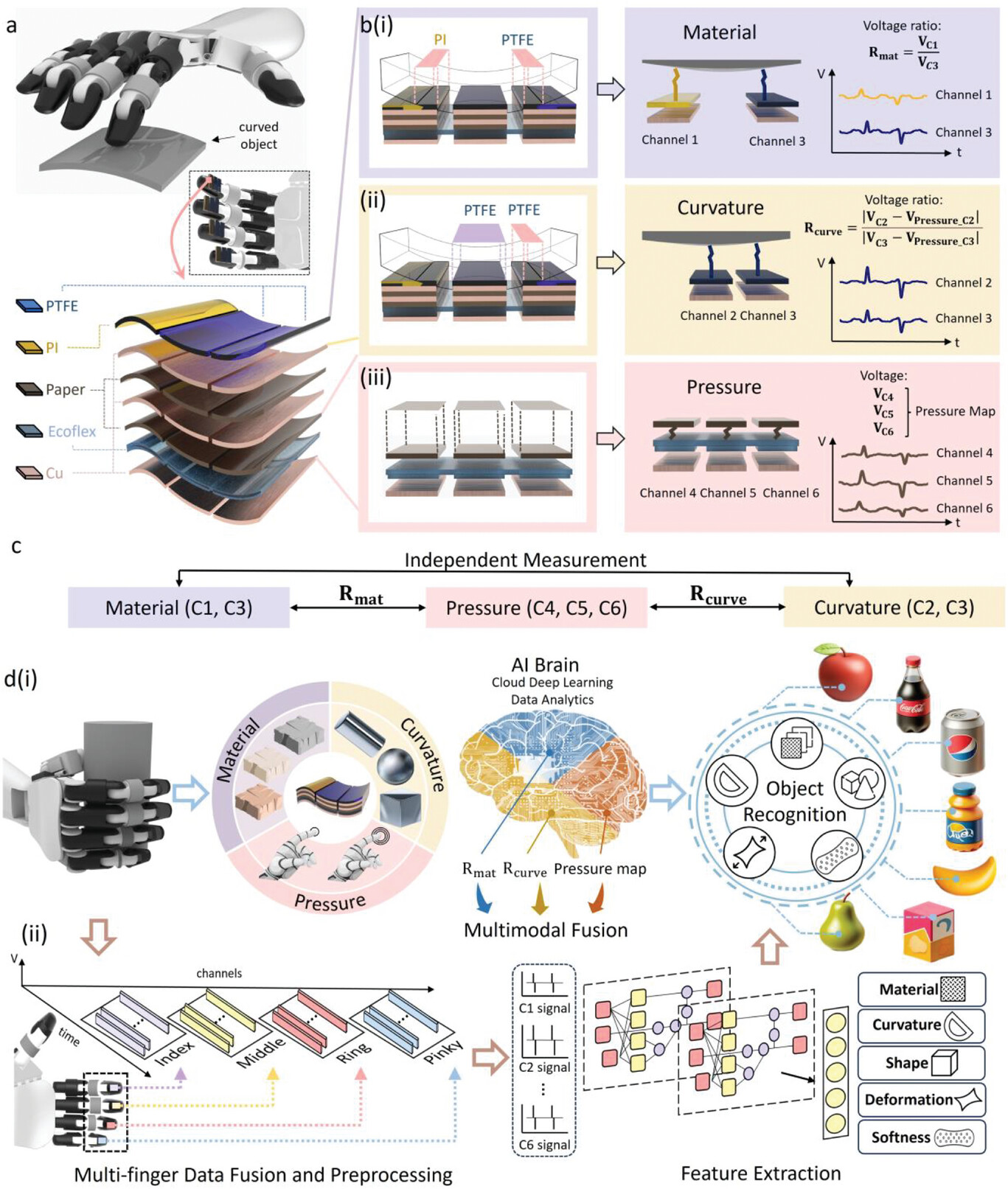
鉴于此,新加坡国立大学Chengkuo Lee等人提出了一种多层结构设计的摩擦电多模态触觉传感器(TMTS),可以同时识别不同的材料、曲率和压力,从而解耦不同的模态,实现更准确的检测。
通过将传感器连接到机器人指尖并利用深度学习分析,定量曲率测量可以更精确地了解物体的详细几何特征,而不仅仅是评估其整体形状,从而以99.2%的准确率自动识别12个抓取的物体。该传感器可进一步用于准确识别机器人手在不同触摸手势下物体的柔软度,准确率达到94.1%,表明其在未来机器人智能社会中具有广泛应用的巨大潜力。
参考文献:
X. Zhao, Z. Sun, C. Lee, Augmented Tactile Perception of Robotic Fingers Enabled by AI-Enhanced Triboelectric Multimodal Sensors. Adv. Funct. Mater. 2024, 2409558.
https://doi.org/10.1002/adfm.202409558

















