大多数灵活的人机接口都模仿皮肤的触觉系统,这有接触损伤的风险。此外,接触变形通常会导致滞后响应。非接触式互动可以解决这些问题。
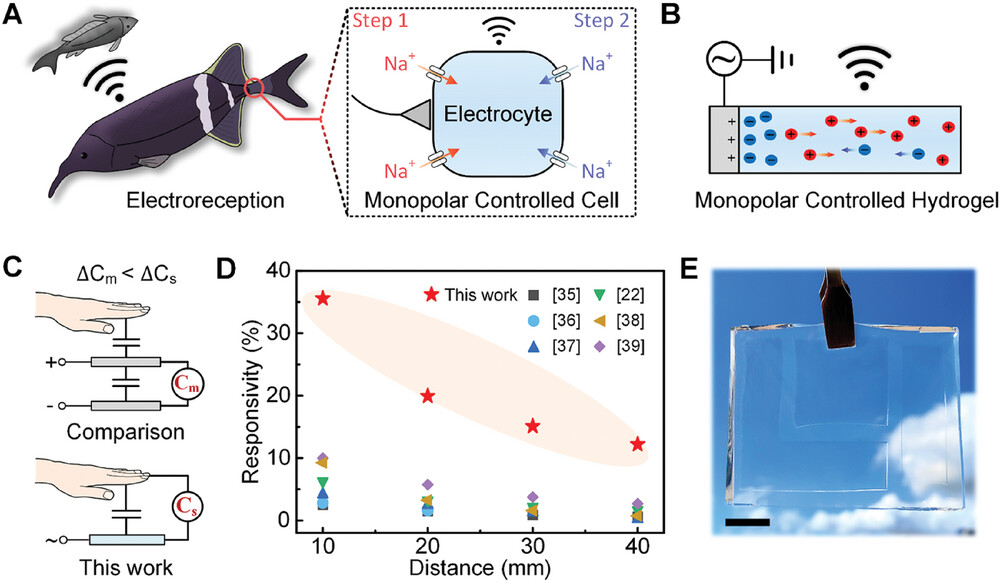
受象鼻鱼电接收能力的启发,哈尔滨工业大学姜洪源、臧天仪和香港理工大学王钻开、香港城市大学Jun Liu等人介绍了一种采用单极控制离子水凝胶的非接触式传感模型。
本文要点:
1)与大多数现有的互电容非接触式传感模型相比,该模型不仅将响应率提高了3.5倍以上,还简化了传感架构。利用这种传感模型,通过将三种不同形状的水凝胶组织成不对称的配置,开发了一种灵活的非接触式人机接口。
2)该设备使用机器学习算法可靠地识别六种非接触式手势,并通过检测手势的持续时间支持至少十一种交互功能,从而能够对外部设备进行连续的实时控制。这一进步预示着人机交互的范式将更加自由,对物联网有着积极的影响。
参考文献:
W. Wu, T. Jiang, M. Wang, T. Li, Y. Song, J. Liu, Z. Wang, H. Jiang, Bioinspired Monopolar Controlled Ionic Hydrogels for Flexible Non-Contact Human–Machine Interfaces. Adv. Funct. Mater. 2024, 2408338.
https://doi.org/10.1002/adfm.202408338

















