蝠鲼利用类似翅膀的胸鳍进行有趣的振荡游泳。它为设计潜在的快速、高效和机动性强的软体游泳机器人提供了丰富的灵感,但这些机器人尚未实现。在使用简单的驱动和控制的同时,将快速、高效和高机动性结合在一个软体游泳者身上仍然是一个巨大的挑战。
在这里,北卡罗来纳州立大学Jie Yin报道了利用蝠鲼状软体游泳者的单稳态扑翼中的自发性弹跳冲程来应对这一挑战。
文章要点
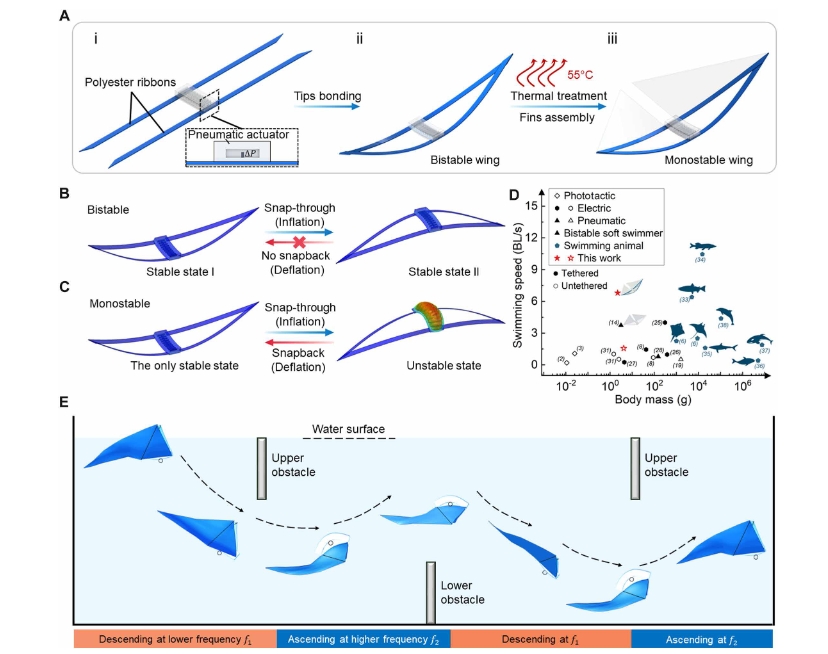
1)单稳态翼由气动驱动,可瞬间弹跳至向下冲程,放气后,它将在弹性恢复力的驱动下自发弹回其初始状态,而无需消耗额外的能量。
2)这大大简化了设计、驱动和控制,只需调整单输入驱动频率,即可在有障碍物的水下非结构化环境中导航,实现每秒 6.8 个体长的创纪录高速度、高能效、高机动性和抗碰撞性。
参考文献
Haitao Qing, et al, Spontaneous snapping-induced jet flows for fast, maneuverable surface and underwater soft flapping swimmer, Sci. Adv. 10, eadq4222 (2024)
DOI: 10.1126/sciadv.adq4222


















